
Justin W.H. Yuen
The Oxeous
Back Exoskeleton Suit

In collaboration with the Biomechatronics and Intelligent Robotics Lab at the City College of New York.
Advanced Mechatronics Course, Fall 2018
Goal
Design and build a portable and wearable back exoskeleton suit for the average persons to lift heavy weight and reduce back injuries
Results
An innovative prototype that introduces a new approach towards back exoskeleton suits
How it works
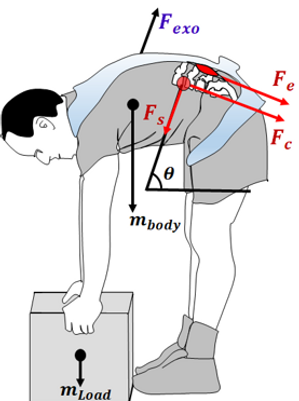
The goal of the suit is to reduce the three forces that can lead to back injuries:
1) the erector spinal force (Fe),
2) the compression force (Fc), and
3) the shear force (Fs),
by providing an assisting force with the exoskeleton (Fexo).
Our design inspired BIRO lab's continued research into disc and ball systems for soft back exoskeleton suits.
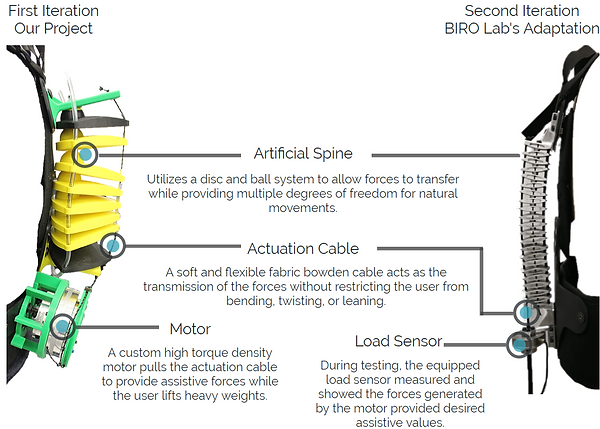
First Iteration
Our Project
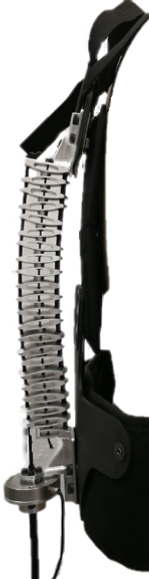
Second Iteration
BIRO Lab's Adaptation

Artificial Spine
Actuation Cable
Utilizes a disc and ball system to allow forces to transfer while providing multiple degrees of freedom for natural movements.
A custom high torque density motor pulls the actuation cable to provide assistive forces while the user lifts heavy weights.
A soft and flexible fabric bowden cable acts as the transmission of the forces without restricting the user from bending, twisting, or leaning.
Motor
Load Sensor
During testing, the equipped load sensor measured and showed the forces generated by the motor provided desired assistive values.

Range of motion
30°
Healthy tester can lean in the frontal plane without difficulty.

Range of motion
80°
Healthy tester was successfully able to bend over in the sagittal plane and perform a stoop lift with assistive forces.

Range of motion
100°
Healthy tester can twist in the transverse plane without difficulty.
We presented our project and poster at the Student Design Showcase, a part of the 2019 Design of Medical Devices Conference.
My team and our mentor Professor Su with our presentation poster and exoskeleton suit.